Hello,
I am interested in using the LG290P to take some long-term (4, 8, 12, 24 hour) static measurements. My plan is to log RTCM3 data and then later convert it to RINEX for post processing. I’m interested in the correct workflow to do this. I believe I may be able to simply enable the RTCM3 messages and capture them alongside NMEA, but if there is anything to be gained by surveying in the device, as there is on some other receivers, I am interested in doing that.
My understanding of the workflow is as follows:
$PQTMCFGRCVRMODE,W,2*29 - Put the unit in base station mode
$PQTMSAVEPAR*5A - Save the configuration to NVRAM
$PQTMSRR*4B - Reboot the unit. When it comes back up, it’s emitting RTCM3 1005, 1124, 1094, 1074, 1084, 1114 messages. Is this sufficient or sure I survey in?
$PQTMCFGSVIN,W,1,0,ECEF_X,ECEF_Y,ECEF_Z*## - If I’m in the field and don’t know my ECEF location, what do I enter here? I have seen some others send three zeroes - is this the correct workflow?
Board is a mozihao unit, firmware is LG290P03AANR01A03S
Hello @george.gao ,can U publish also [2] Quectel_GNSS_Module_EVB_User_Guide
because I see a QNTRIP agent is implemented…(in GNSS MODULE EVB Console) ,
Is there a public source on this software?
Hi John, I suggest U to change/set rtcm in the msm7 as in 2.3.39. PQTMCFGRTCM if U are done static m. for post_processing after the base_mode… and enable also <EPH_Mode> in the same command.
You can also use the survey mode at the same time or after, for a comparison between post_p & internal_survey-in algorithm feature.
Regards
@george.gao Thank you, the base station application note is exactly what I was looking for! As for my firmware, is it current? I have noticed in some other posts you have provided updated firmware for other folks. My email address is john@millerjs.org
@bamarcant Thanks for the notes! Do you have a recommended method for enabling MSM7 messages? I’ll need to do some testing to find the best workflow.
Also - I found a preliminary version of the EVB user guide. Lots of information about that software, but no notes about where to find it. The forum isn’t letting me attach a link to it, but here’s how to find it:
Do a search for “new product introduction LG290P” site:mouser.com
You should find a PDF called Quectel_Wireless_Solutions_08-13-2024_LG290P.pdf
On the last page, there will be a link to download “EVB User Guide”
That will take you to a sharepoint site, where you can download Quectel_GNSS_Module_EVB_User_Guide_V1.0.0_Preliminary_20240416.pdf
Aha! I think I figured out the right way to do RTCM MSM7 messages. I made my unit unhappy, so I started with a factory restore.
$PQTMRESTOREPAR*13 - factory restore
$PQTMSRR*4B - reboot
$PQTMCFGRCVRMODE,W,2*29 - enter base station mode
$PQTMSAVEPAR*5A - save
$PQTMSRR*4B - reboot again
$PQTMCFGRTCM,W,7,0,5,07,06,2,3600*01 - enable RTCM MSM7 (this is the example from the base station app note document, 5deg mask and hourly ephemeris updates.)
$PQTMSAVEPAR*5A - save again
$PQTMSRR*4B - reboot again. Watch the Message Statistics tab of QConsole to make sure 1**7 messages are updating.
$PQTMCFGMSGRATE,W,RTCM3-1019,1*54$PQTMCFGMSGRATE,W,RTCM3-1020,1*5E$PQTMCFGMSGRATE,W,RTCM3-1042,1*5A$PQTMCFGMSGRATE,W,RTCM3-1046,1*5E - Enable ephemeris data for GPS/GLO/BDS/GAL
$PQTMSAVEPAR*5A - save again
$PQTMCFGSVIN,W,1,3600,1.2,0,0,0*0A - Start an hour long self survey with 1,2m 3D accuracy.
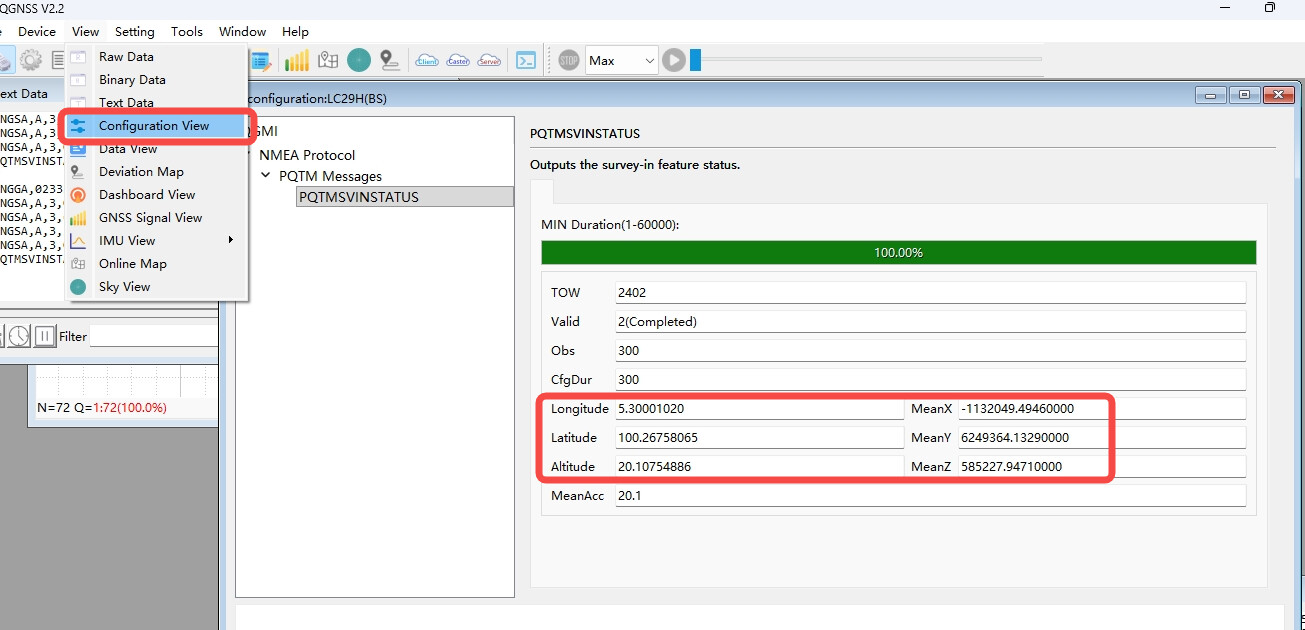
$PQTMCFGMSGRATE,W,PQTMSVINSTATUS,1,1*58 - Enable survey status messages. Wait for it to complete, then record the ECEF_XYZ. (Why doesn’t PQTMSVINSTATUS populate the Message Statistics page?)
$PQTMCFGMSGRATE,W,PQTMSVINSTATUS,0,1*59 - Disable the survey status messages.
$PQTMCFGSVIN,W,2,3600,1.2,####,####,####*## - Update the survey mode to be fixed using the ECEF XYZ coordinates captured previously.
$PQTMSAVEPAR*5A - save
$PQTMSRR*4B - reboot again
Something I’m noticing is that the survey in status doesn’t really seem to make a whole lot of sense. What’s the expected behavior? If I start a survey with the command used above at #11, and monitor the SVINSTATUS messages, it seems as though the number of observations used holds (in this case, at 22) and CfgDur is set to 0. The valid flag is 2, which I interpret as “the self survey has completed and a valid fix has been found”. This doesn’t make sense to me, because the minimum number of positioning times I set was 3600. If I query CFGSVIN, I still see that it is set to 3600.
@george.gao I am also trying to gifure out the correct workflow for getting survey in to work. So far my attempts seemed to fail as the LG290P was sending RTCM data while it should be surveying. Could you send me the newest version of the firmware & docs for base station mode?
I will send you the latest firmware via email, please check it and let me know if you have any difficulty receiving it.
The workflow will be as follows for setting up surveying in GNSS Module
$PQTMRESTOREPAR *13 // Restore parameter
$PQTMCFGRCVRMODE,W,2 *29 //Switch to rover mode
$PQTMSAVEPAR *5A //After save parameter please reset the module
$PQTMCFGSVIN,W,1,43200,15.0,0,0,0 *0D // Do the survey-in for 12 hours (43200 seconds)
$PQTMCFGMSGRATE,W,PQTMSVINSTATUS,1,1 *58 // Monitor survey in status
$PQTMCFGSVIN,W,1,3600,1,0,0,0*16
or $PQTMCFGSVIN,W,1,3600,15,0,0,0*23
with 1 and 15 3D position standard deviation respectively
3600 second = 1 hour…
look at mean acc
a good mean acc must be < 0.9 ; at least 1.0 etc.,
e,g a not good (2.7281) $PQTMSVINSTATUS,1,388316000.0,1,,11,76,300,X704512.5236,Y298188.6742,Z093136.1610,2.7281*3C
and a good one (0.4468) $PQTMSVINSTATUS,1,372491000.0,2,,55,1,0,x704517.6844,y298191.4144,z093138.1250,0.4468*0C
When done disable the Survey-In observation results $PQTMCFGMSGRATE,W,PQTMSVINSTATUS,0,1*59
but U can use the galileo HAS feature for a better result…