M9N is a good module but doesn’t have a rtk engine even though it supports dgps fixes and that’s what makes it “stable” on the drone; try to do the same with LC29H without rtk fixes but with a good 3axis module…
List some commands, the latest with strong restrictions.
$PAIR513*3D save file system
$PQTMSAVEPAR*5A save file system
$PAIR512*3C clear data
$PAIR830,1*2C PAIR_RAW_ENABLE
$PAIR830,0*2D PAIR_RAW Disable
$PAIR050,100*22 → Set 10Hz fix rate, and module change to 10Hz immediately
$PAIR050,200*21 → set pos output interval to 200 ms 5 Hz
$PAIR382,1*2E → Test command for lock system sleep enabled
$PAIR003*39 → power off GNSS system
$PAIR002*38 → power on GNSS system
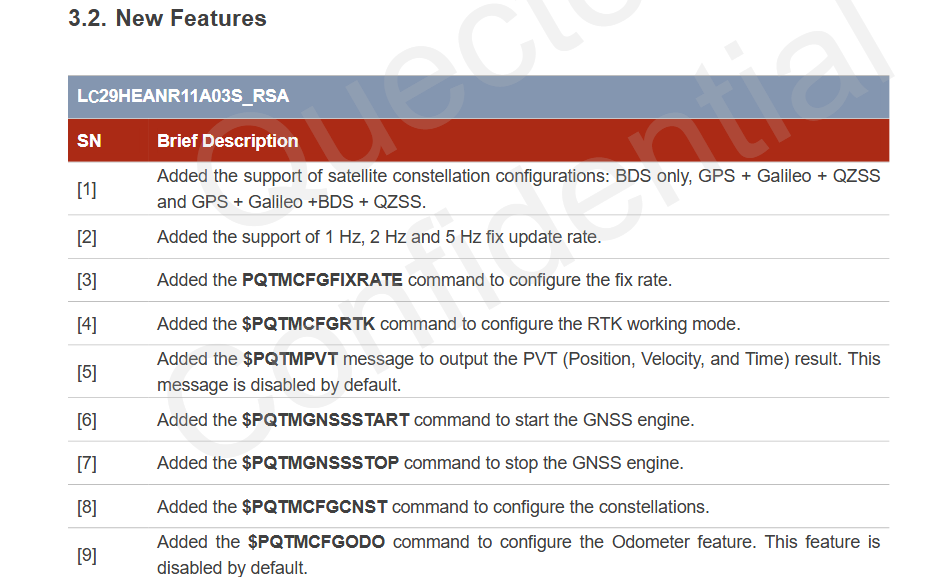
$PQTMGNSSSTART*51 → power on GNSS system
$PQTMGNSSSTOP*09 → power off GNSS system
$PAIR023*3B reboot module
$PQTMCFGSVIN,W,2,0,0,-2404572.0411,5381092.5507,2429899.7105*21 set antenna position in ecef x,y,z
$PQTMRESTOREPAR*13 → Restores all parameters set via $PQTM
$PAIR514*3A Clear the current configuration and restore the default settings set via $PAIR
$PQTMCFGMSGRATE,W,PQTMEPE,1,2*1D how accurate is the obtained position
$PAIR864,0,0,115200*1B set default uart port to 115200 baud
$PAIR865,0,0*31 ask baud for default uart port
$PQTMCFGRCVRMODE,W,2*29 # set receiver to base mode
$PQTMCFGRCVRMODE,W,0*2B set receiver to unknown mode
$PQTMCFGRCVRMODE,W,1*2A set receiver to rover mode
$PQTMCFGRCVRMODE,R*32 ask result
RTCM: 1005 (019) 2024-05-17 17.21.08 StationID=3335 X=0704503,6070 Y=0298182,6322 Z=4093129,0631
$PQTMCFGSVIN,W,2,0,0,x,y,z*<Checksum>
$PQTMCFGSVIN,W,1,360,1,0,0,0*26 start survey for 360 second
$PQTMCFGSVIN,R*26 get fix position
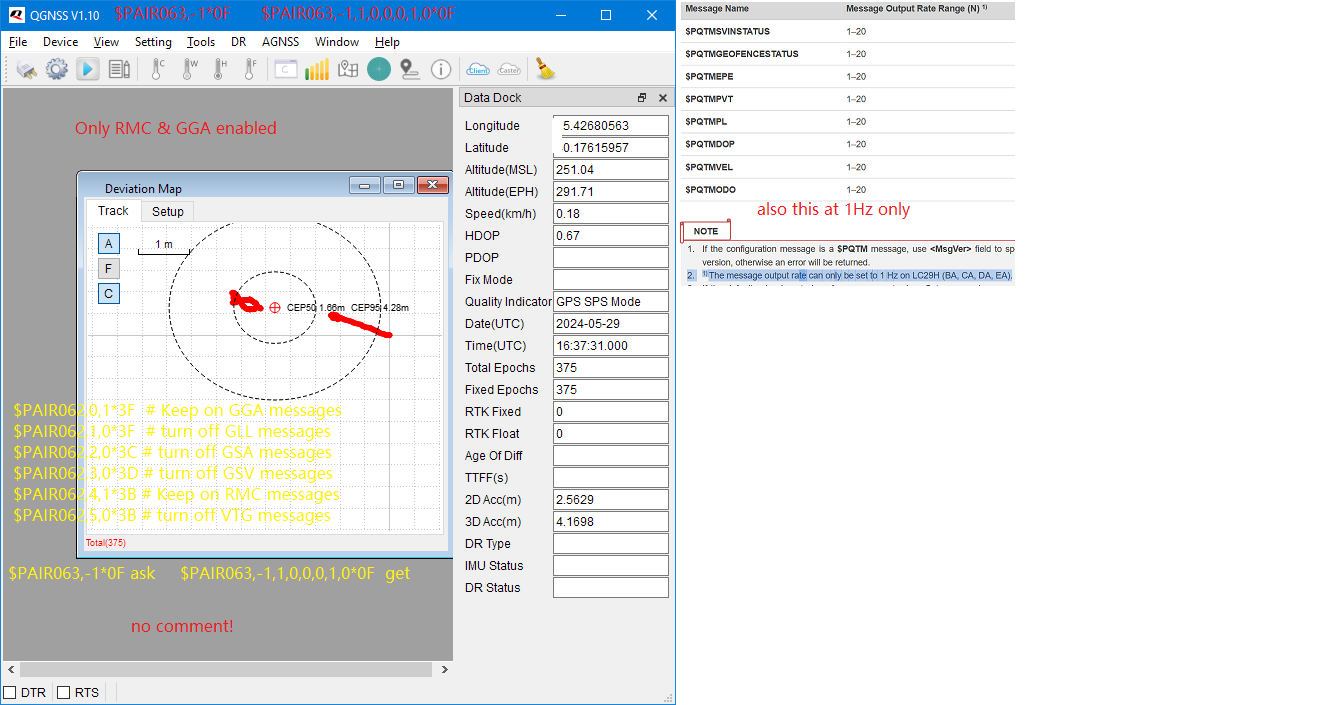
$PAIR063,-1*0F resp.: $PAIR063,-1,1,1,1,1,1,1*0F return NMEA output to default settings (all Nmea sentences)
$PAIR062,0,1*3F only CGA sentence
$PAIR007*3D → Full cold start will performs a cold start and clears system and user configurations,Restores all parameters to factory settings.
$PQTMCFGMSGRATE,W,PQTMEPE,1,2*1D → enable PQTMEPE output.
$PQTMCFGNMEADP,W,3,8,3,3,3,3*39 -->configure ALL to max decimals
$PQTMCFGMSGRATE,W,PQTMPVT,1,1*1C $PQTMCFGMSGRATE,R,PQTMPVT,1*04 PQTMPVT at 1Hz Outputs the PVT (GNSS only) result
$PAIR862,0,0,37*1E Set GNSS port data type configuration to nmea+command in & out see last edit
bitmap to config data type (0x01)(0x04)(0x20) = 0x25 to decimal is 37
--> GNSS_IO_FLAG_OUT_NMEA | GNSS_IO_FLAG_OUT_CMD_RSP |GNSS_IO_FLAG_IN_CMD
$PAIR058,15*1F snr treshold to 15
$PAIR058,35*1D snr treshold to 35
$PAIR070,16*16 Sets the static navigation speed threshold to 16 dm/s
$PAIR072,15*17 elev mask to 15°
$PAIR074,1*24 Enable active interference cancellation function
$PAIR080,5*2B Set navigation mode for drone
$PAIR081*33 ask navigation mode
$PAIR391,1*2C enable jamming detection message output
DGPS correction data source mode : $PAIR400,1*23 for rtcm corr. $PAIR400,2*20 for sbas $PAIR400,0*22 none
$PQTMCFGMSGRATE,W,PQTMGEOFENCESTATUS,1,1*5C enable GEOFENCE outputs
$PAIR104,0*23 dual band disable
$PAIR104,1*22 enable dual band (default)
$PAIR473,1*27 Enable EPO data aiding & limits saving the flash range to 80K.