Hello,
Setup
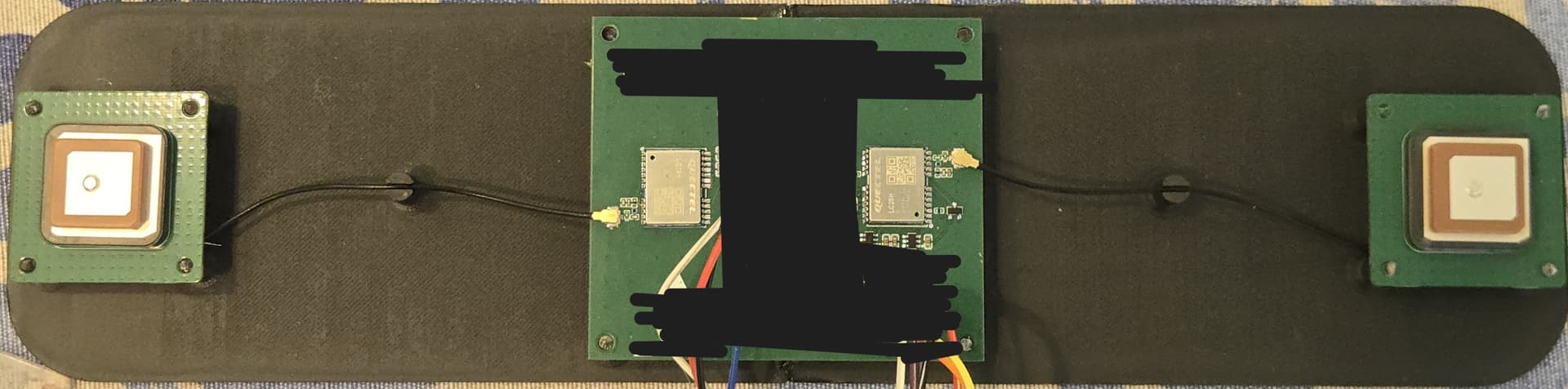
- 2× LC29HEA, firmware LC29HEANA11A04S_RSA
- 2× YFGA225E3AM active patch antennas (L1+L5), identical orientation
- Baseline: 27.4 cm center-to-center (within documented 0.2–5 m range)
- Wiring: Per Application Note — Base UART2 ↔ Rover UART1
- Output rate: 10 Hz, PQTMTAR enabled
- Application: Compact marine GNSS satellite compass
Problem
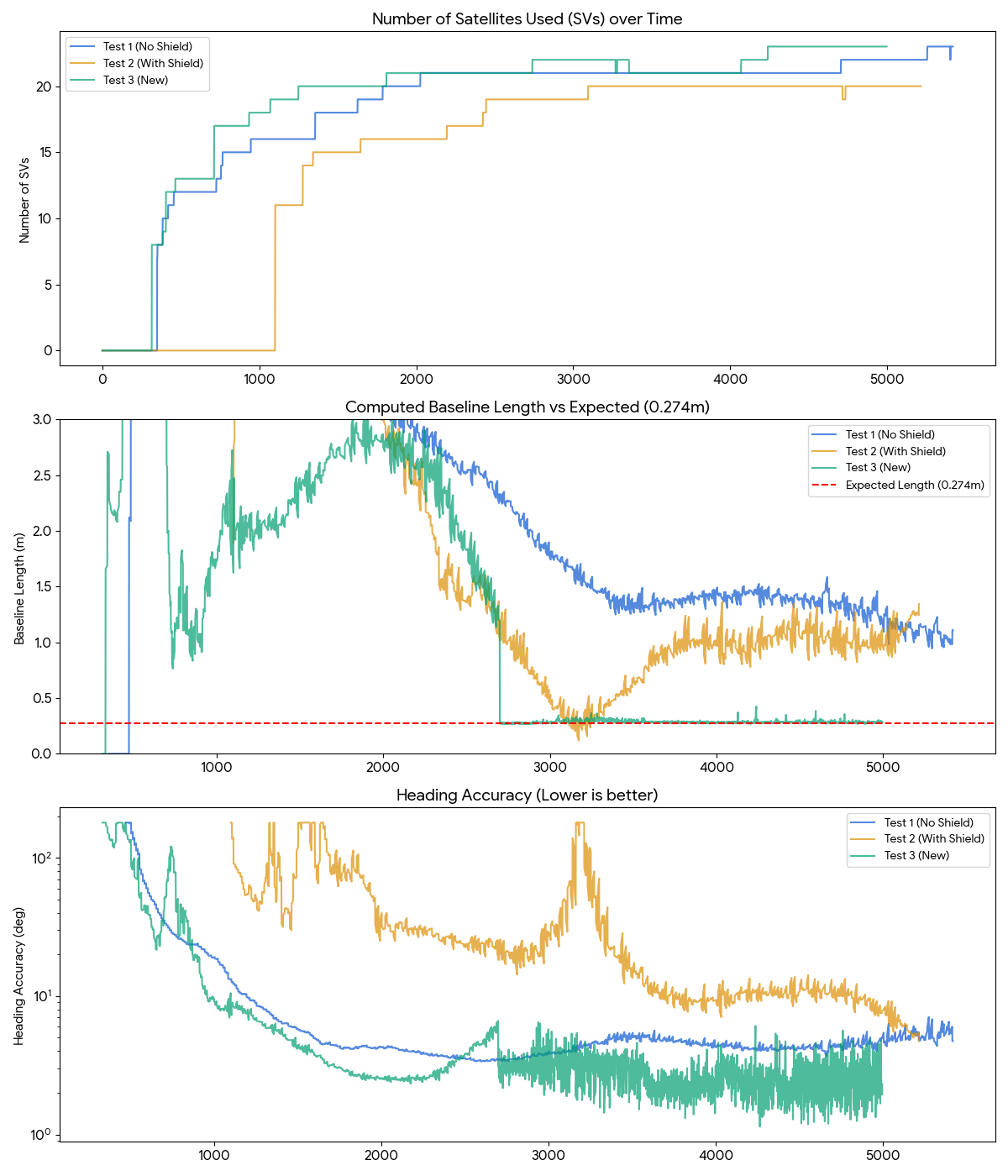
After a 9+ minute cold-start log (5420 PQTMTAR messages, open sky, excellent signals):
1) Never reaches RTK Fixed:
- Quality 4 (RTK Fixed): 0 messages (0%)
- Quality 5 (RTK Float): 4945 messages (91%)
2) Reported baseline is completely wrong:
- Physical baseline: 0.274 m
- Reported baseline: 0.94–8.84 m (average 2.47 m)
- Even best-accuracy readings report ~1.1 m — never close to 0.274 m
- This indicates the ambiguity resolution is converging on incorrect integer solutions
3) Heading is wrong:
- Expected: ~320°
- Reported: 74°–149° (average ~93°) — ~135° error, not a simple 180° swap
4) Signal quality is NOT the issue:
- 21–23 satellites, SNR 30–47 dB-Hz, HDOP ~1.05, DGPS fix on GGA
- 85% of float solutions have heading accuracy < 10°
Sample PQTMTAR (best accuracy period)
$PQTMTAR,1,191524.300,5,,1.187,-6.264394,,95.868037,4.529717,,4.529717,23*7E
Quality=5 (float), baseline=1.187m (should be 0.274m), heading=95.8° (should be ~320°)
Questions
- Can the LC29HEA moving base engine reliably resolve ambiguities at baselines ≤ 30 cm? The App Note states 0.2 m minimum and shows drones/robots with short baselines. Commercial marine GNSS compasses (u-blox F9P/F9H based) work at these distances routinely.
- Is there a baseline length constraint parameter to help the solver? (Similar to u-blox
pos2-baselen) - Would reducing output rate to 1–5 Hz help? Other users report better RTK Fix at 5 Hz.
- Is there a newer firmware that improves short-baseline moving base performance?
- The baseline is reported 4–30× too large — this is a clear sign the float solver is locking onto wrong ambiguities. Is this a known limitation?
Everything has been verified: wiring per App Note, identical antennas/ground planes, UART2↔UART1 communication working (Float is achieved), excellent signal environment.
Thank you for any guidance.