where can i download ?
Hi Reziko,
We don’t provide official link for firmware download. I will send you the firmware via message.
Best regards.
Good evening, please could you send it to me too.
Hi. I am experiencing inconsistent RTK GPS performance (location is Melbourne, Australia). Can I please confirm firmware versions before logging a more complete support request. LC29H-BS shows LC29HBSNR11A01S dated 13 Feb 2023, LC29H-DA shows LC29HDANR11A03S_RSA dated 19 March 2024.
Hi AndrewCrocker
I have sent the latest firmware of LC29HDA to you through email, please check it.
And your LC29HBS firmware is the latest.
Moreover,
Do you use LC29HBS be a base and LC29HDA be a rover to test RTK performance?
What is your actual application?
Note: When you test RTK performance, please make sure the test environment is open enough, if test environment is too bad, then it is tough to have a good RTK GPS performance. You can share me your test’s nmea log through email, then i can analysis this problem.
Best regards.
Hi Jasper, thanks for your response. I have received the firmware upgrade and associated via email. I am using the LC29HBS as the base and LC29HDA as rover as you suggest. I also have a ublox ZED-F9P set up as a base to provide alternatives during testing. The application is for an automonmous buoy for sailing yachts - there are many buoys required for a course and the RTCM output of the LC29HBS is transmitted via radio to the LC29HDA mounted on the buoys. The nature of the application means that both the LC29HBS and LC29HDA are in very open environments (on a lake, for example). I am finding that the LC29HDA seem overly sensitive to the antenna configuration - I am using a passive, 50mm square, dual band puck style antenna. I was testing yesterday and while able to get the LC29HDA to floating RTK, it would not resolve to fixed RTK. I will try the firmware upgrade and further variations so see what I can find. Thanks and regards.
Hi Andrew Crocker
Could you supply the data sheet of antenna?
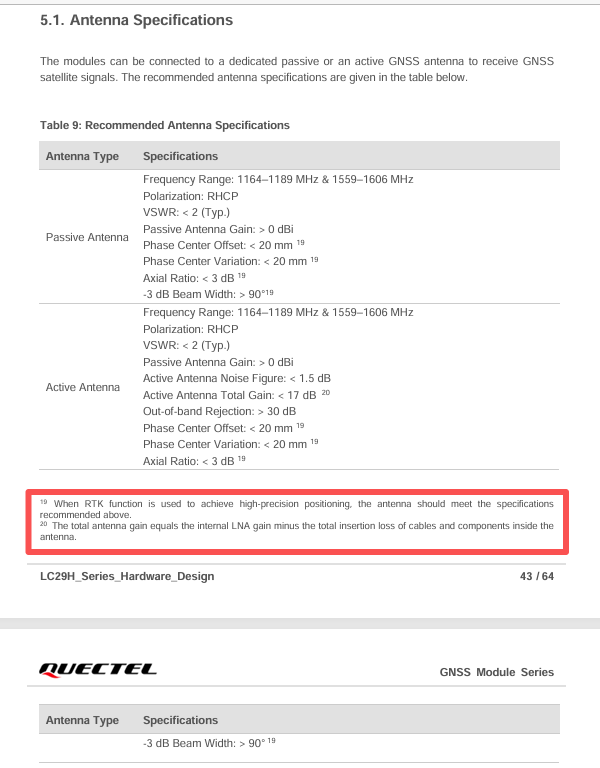
When RTK function is used to achieve high-precision positioning, the antenna should meet the specifications recommended above.
Best regards
Thanks Jasper. I am seeking the datasheet for the antenna and will revert. As delivered, the antenna has a 3 metre RG174 cable with SMA connector. In that configuration, I can get fixed RTK in most cases. However, I need to shorten the cable to fit the antenna into its normal location. When I shorten the cable to around 80mm (and replace the SME connector), I can no longer get fixed RTK. This confuses as such a short length should not change the impedance or wave length characteristics.
Further on this. The LC29HDA upgrade worked very well - so thank you for that. I have been doing limited testing today using both a Quectel YB0017AA Antenna and this one https://www.aliexpress.com/item/1005007077248776.html?pdp_npi=4%40dis!AUD!AU%20%2426.24!AU%20%2420.99!!!16.89!13.51!%402101e81117622260022226363e33ba!12000039325536360!sh!AU!0!X&spm=a2g0o.store_pc_allItems_or_groupList.new_all_items_2007523699384.1005007077248776 The base station is an LC29HBS unit. The Quectel antenna gives better results but still only a floating RTK (the other antenna, not even that). This however is the same as I am getting with a ublox ZED-F9P rover so I am assuming that sky conditions are impacting. I am comfortable that my issues are antenna related so I will pursue that angle. Regards.
Check that the internal plug of the sma connector is the right one:

female on module side
and male for antenna side

also check if the base is configured correctly and for the rover you can disable nmea messages and read only the GGA…
BASE
$PAIR382,1*2E → Test command for lock system sleep enabled
$PAIR003*39 → power off GNSS system
$PQTMCFGSVIN,R*26 check if ECEF base is correct
$PQTMCFGSVIN,W,2,0,0,X,Y,Z*<Checksum> in ECEF value
or the same in decimal degrees
$PAIR604,1,1,Latitude.12345678,Longitude.12345678,Height,123*<Checksum>
$PAIR434,1*24 ==> set RTCM3.x output with message type 1005
$PAIR432,1*22 ==> set RTCM3.x output with type MSM7
$PAIR436,1*26 ==> set RTCM3.x output with satellite ephemeris```
$PQTMSAVEPAR*5A
$PAIR023*3B
ROVER
$PQTMGNSSSTOP*09 power off GNSS system
$PQTMCFGNMEADP,W,3,8,3,3,3,3*39 ; set Max decimal places
$PAIR062,1,0*3F Disable GLL sentence.
$PAIR062,2,0*3C Disable GSA sentence.
$PAIR062,3,0*3D Disable GSV sentence
$PAIR062,4,0*3A Disable RMC sentence.
$PAIR062,5,0*3B ; Disable VTG sentence.
$PQTMSAVEPAR*5A
$PAIR023*3B
Hi - thanks for the response. I believe that the SMA connector is correct - both the LC29HBS and LC29HDA are able to get standard fix very quickly - although there is clearly something going on given the variability in antenna performance.
For reference, the Base Station is configured as follows:
“$PQTMCFGRCVRMODE,W,2*29”
then:
“$PAIR432,022\r\n";
"$PAIR434,124\r\n”;
“$PAIR436,1*26\r\n”;
which is the same as you suggest. I then set the base station into “Survey In” mode as follows:
“$PQTMCFGSVIN,W,1,240,15,0,0,0*XY\r\n”
I actually start with 13metres as the precision and then increase as required to begin to get solutions.
The Rover is configured for only RMC messages (that happens to suit my application) and then:
$PQTMCFGNMEADP,W,3,8,2,2,3,2XY\r\n
$PAIR080,1XY\r\n
The navigation mode 1 suits my application.
Regards,
Andrew
Ok, but if you have zed f9p , get a survey from it (more accurate module) and set a fix for the lc29hbs module, then if possible provides rtcm msm7 not $PAIR432,0*22 output for better performance…
$PAIR432,1*22
Regards
Hi Marco - thanks again for the response. To be honest, the reason for using the LC29H is that it is a far more economical solution than the ublox - particularly here in Australia - in an application where cost is very much a factor and the performance, so far, seems more than good enough. In this application, precision is much more important than accuracy. And because the base stations will be set up in places where the exact location is not necessarily known, the use of survey in is the best that can be done. Your suggestion on using msm7 is interesting and I will try that today. Thanks again for your assistance with all this. Regards, Andrew.
Hi Marco. I would appreciated you feedback on this. I applied the MSM7 setting to the LC29HBS and while some improvement was seen, the LC29HDA seemed to remain in floating RTK mode. I then changed the navigation mode on the LC29HDA to “Normal” (i.e. mode 0) instead of “Fitness” (mode 1) and this appears to have solved the problem - the LC29HDA units now reliably go to fixed RTK mode within a couple of minutes of receiving correction signals. This surprises me as I assumed the filtering to the navigation modes would be downstream of the solution calculation using RTCM data. Regardless, the units are now reliable and work well.
Regards, Andrew
I wanted to warn you, but you were right to say so…
it also happened with drone mode and it turned out that zero mode is the reliable one.
Thanks for sharing your feedback.
Marco
Hi Marco - thanks for the confirmation and link to similar discussions. Regards, Andrew