Hi Support Team,
I’m curious about the usage of the PQTMVEHMSG with the LC29H(BA):
As this is message is marked in the interface document as Input/Output, I’m not sure what input I could setup resp. which output I can get from the device.
Is there any application note how to setup RTK/DR with the different (four wheel) $PQTMxxx messages and especially the $PQTMVEHMSG, as this seems to be some kind of setup of the device?
Thanks in advance and a happy new year!
pstumbler
Hi Pstumbler,
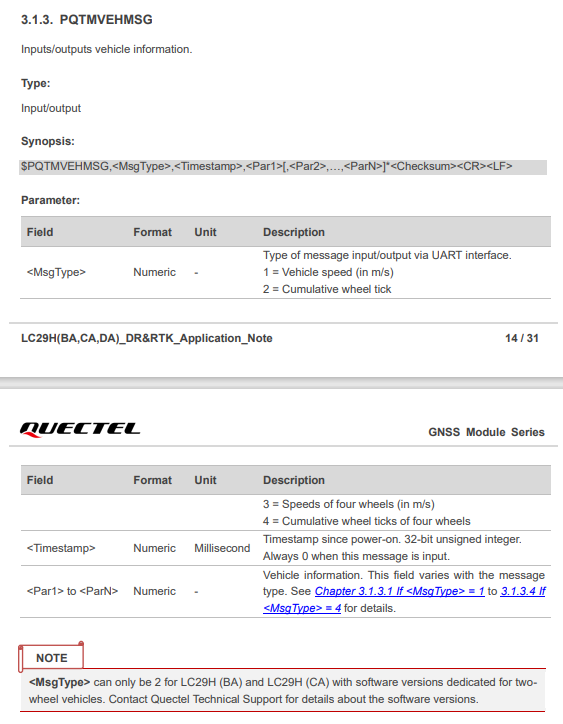
PQTMVEHMSG has provided 4 ways to inject vehicle speed by software method. Vehicle speed or cumulative wheel tick can be provided by external sensor. MCU receive the speed information and inject them to LC29HBA via PQTMVEHMSG command.
The difference between input and output type is timestamp. Input type’s timestamp is always 0. So while injecting vehicle speed, you don’t need to arrange timestamp information.
Best regards and happy new year!
Hi Raphael-Q,
thanks for the answer, but this does not really help.
What will it help me if I’m providing the speed - how should I use this?
Again I’m asking for any kind of application note how to use the DR/RTK features of the device. The document I have (Quectel_DR&RTK_Application_Note_V1.0.pdf) only gives information about the interface, but does not explain anything!
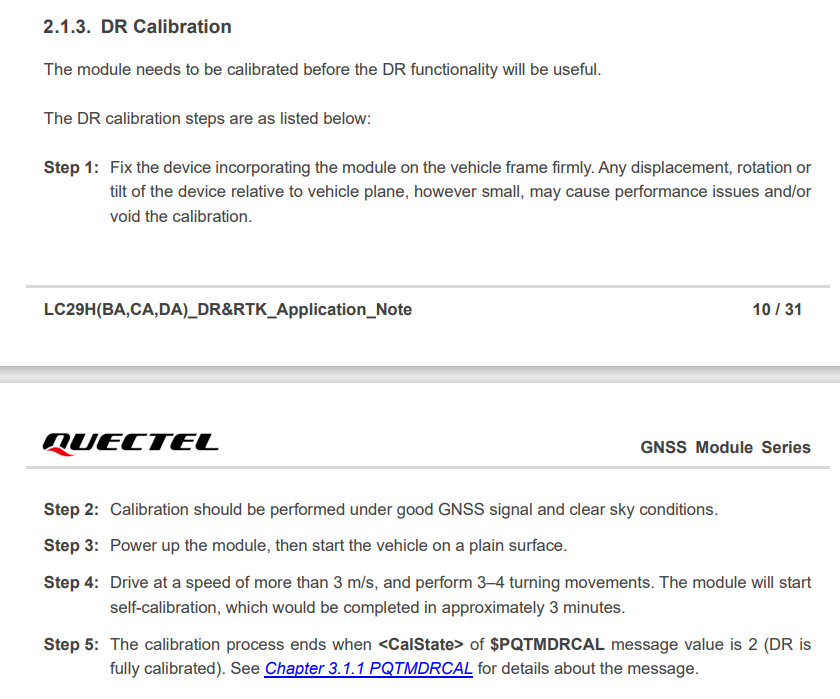
I want to use it in an automomous lawn mower - how should I get it to 3m/s for the DR to calibrate?
There must be more information how to use it - otherwise it is useless…
Thanks
Hi Pstumbler,
I’m sorry that I didn’t know your product in advance. LC29H series don’t have an algorithm that support autonomous lawn mower DR application.
But LC29HB supports two solutions for Dead Reckoning which include ADR and UDR. ADR needs a vehicle speed injection but UDR does not. Therefore, UDR’s accuracy is a bit lower than ADR. When there is a vehicle speed injection, DR mode will automatically switch to ADR.
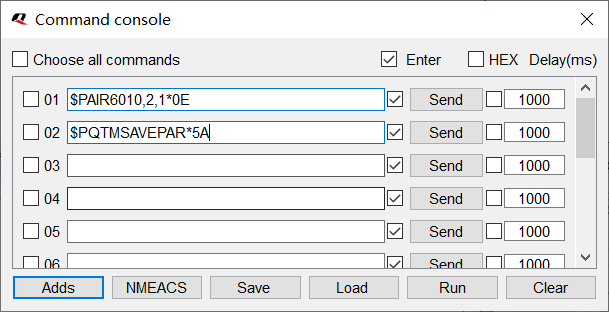
If you want to use DR function. Please first turn on $PQTMDRCAL sentence that can indicate DR calibration status. And you need to calibrate the device referring to Chapter 2.1.3. DR Calibration.
$PAIR6010,2,10E //open PQTMDRCAL
$PQTMSAVEPAR5A //Save the PQTM configuration and PQTM commands will take effect after restart
Best regards.