Hello,
We are planning to use the L76-LB in our application. This application consist of a device that is placed in a static location. We are looking to get an as-accurate-as possible location. The devices are generally powered several hours per day and then completely powered down, without backup batteries. There is limited RAM etc availabie to store data over longer time to do averaging or the like.
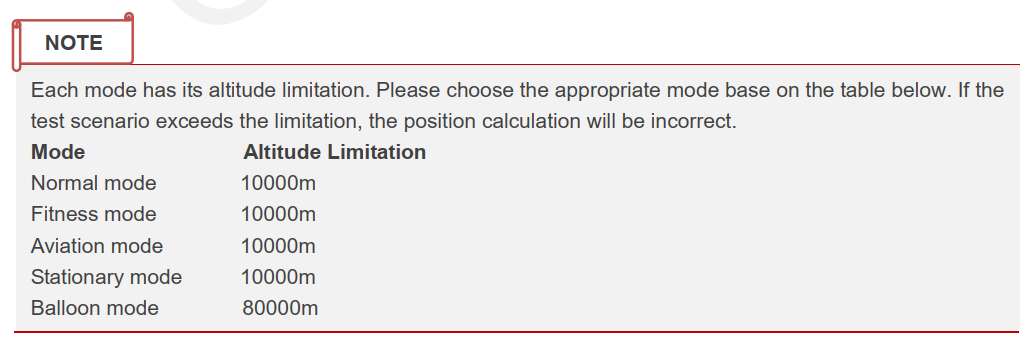
The first thing we were looking at was PMTK_FR_MODE in mode “4” stationary mode, however that appears to have a max height of only 1000m, which would be an issue in at least one of our target cities. A second thought we had was using PMTK_API_SET_STATIC_NAV_THD to 2 as we are static, will this increase the accuracy or only prevent the location from updating after the first fix, until a larger change in location is detected?
Is there an application note or white paper available for time based integration of the location? For instance by averaging over a longer period of time or the like?
Kind regards,
Stefan