Ajin_A
October 8, 2025, 10:02am
1
Hello !!
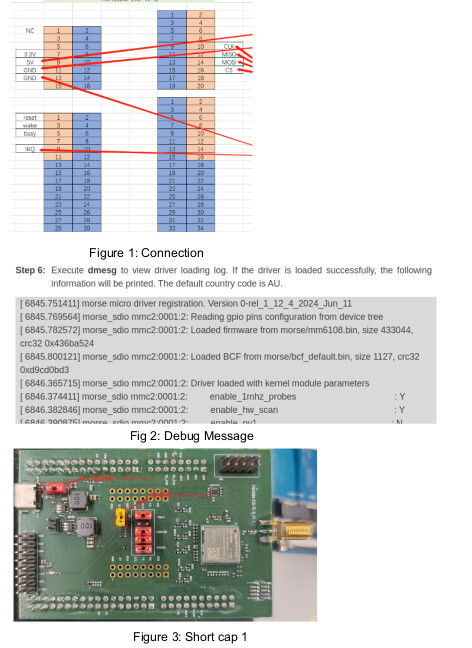
For setting it as AP, I have configured the device tree of Orin Nano for SPI and loaded the morse.ko and dot11ah.ko using insmod.
But when I loaded morse.ko, it is showing registration information only.
“Morse Micro Dot11ah driver registration. Version 0-rel_1_12_4_2024_Jun_11
And it is not printing other information and creating dev/morse_io node as shown in Figure 2:
First of all, I need to check whether the device is turned on perfectly. Is there any status LEDs on the FGH100M-ZIO board? As of now, no LED’s are turned ON.
I am providing supply from the Jetson Nano board to FGH100M-ZIO through 5V and GND pins,. Also the shorcap1 connected to the right only. The short cap 1 is shown in Figure 3
Thanks,
Ajin_A
October 9, 2025, 7:55am
2
After enabling the CONFIG_MORSE_SPI flag, the driver attempts to use the SPI interface. Now the error showing is:
Morse Micro Dot11ah driver registration. Version 0-rel_1_12_4_2024_Jun_11
The error may be because the FGH100M chip is not detected. How can I verify whether the FGH100M-ZIO-TE-B is powered ON?
Thanks
There is no such LED. It is RF Wi-Fi and so it cannot work seperately.
1 Like
Ajin_A
October 10, 2025, 2:02pm
4
Thanks. I have checked VBAT, VDDFEM and VDDIO. The voltages on those pins are 3.38V. So the module would be working. In the FGH100M Hardware Design Manual, it is shown that we can switch to SPI mode by controlling SDIO_DATA3 and SDIO_CMD. So would I have to do any additional settings other than loading its driver, to operate FGH100M in spi mode?
Also is there any role for WAKE and RESET pins at starting?
There is no special settings. Maybe you can check the status of the wakeup_in and reset. It should be high level.
1 Like
Ajin_A
October 11, 2025, 6:43am
6
Okay, Thanks. I drive wakeup and reset pin to high level. Also, I found that fgh100m kernel is successfully detecting the device tree. I debugged that from the kernel:
[ 486.939798] spi=00000000ad341f49 name=mm610x-spi bus=1 cs=0
But I am having the following error:
Ajin_A
October 11, 2025, 9:45am
8
Thanks,
Yes, The dts overlay which I am using on Jetson Orin Nano(Jetpack 6.2.1) for the morse driver is given below.
/dts-v1/;
/plugin/;
/ {
overlay-name = "My Jetson Overlay Example";
jetson-header-name= "Jetson 40pin Header";
compatible = "nvidia,p3768-0000+p3767-0005";
fragment@0 {
target-path = "/bus@0/spi@3230000/spi@0";
__overlay__ {
status = "disabled";
};
};
fragment@1 {
target = <&pinmux>;
__overlay__ {
pinctrl-names = "default";
pinctrl-0 = <&jetson_io_pinmux>;
jetson_io_pinmux: exp-header-pinmux {
hdr40-pin13 {
nvidia,pins= "spi3_sck_py0";
nvidia,function = "spi3";
nvidia,tristate= <0x0>;
nvidia,enable-input = <0x1>;
};
hdr40-pin16 {
nvidia,pins= "spi3_cs1_py4";
nvidia,function = "spi3";
nvidia,tristate= <0x0>;
nvidia,enable-input = <0x1>;
};
hdr40-pin18 {
nvidia,pins= "spi3_cs0_py3";
nvidia,function = "spi3";
nvidia,tristate= <0x0>;
nvidia,enable-input = <0x1>;
};
hdr40-pin22 {
nvidia,pins= "spi3_miso_py1";
nvidia,function = "spi3";
nvidia,tristate= <0x0>;
nvidia,enable-input = <0x1>;
};
hdr40-pin37 {
nvidia,pins= "spi3_mosi_py2";
nvidia,function = "spi3";
nvidia,tristate= <0x0>;
nvidia,enable-input = <0x1>;
};
};
};
};
fragment@2 {
target-path = "/bus@0/spi@3230000";
__overlay__ {
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
mm6108:mm6108@0 {
compatible = "morse,mm610x-spi";
reg=<0>;
spi-max-frequency=<50000000>;
// spi-irq-gpios = <&gpio 125 0x0>;
// reset-gpios = <&gpio 54 0x0>;
// power-gpios = <&gpio 166 0x0>,<&gpio 126 0x0>; // WAKE or RESET
status = "okay";
};
};
};
};
2.The FGH100M-ZIO-TE-B WiFi HaLow module has FGH100MABMD chip. The driver, I am using is Version 0-rel_1_12_4_2024_Jun_11.
From the log, I think the spi response is not receiving. Is there any way to debug that?
Please check the md5 of the bcf_default.bin and the mm6108.bin.
Ajin_A
October 13, 2025, 6:53am
10
Yeah I checked those:
Inside morse_chip_cfg_detect_and_init(), it is searching R1 response using morse_spi_find_response(). When I debugged there, it is failing on
if (*cp != 0x00) {func );
Thanks,
Ajin_A
October 13, 2025, 3:07pm
12
@Bean.Wang-Q , Can you check whether the kernel is supported for this chip? I doubt it since no response is coming.
Maybe you can try the 1_14_1.
Why did you remove the spi-irq-gpios?
Ajin_A
October 14, 2025, 11:28am
15
Hi @Bean.Wang-Q ,
But Later on, the device come back to previous error. So I think I have to debug from hardware.
As you described, it should be the connection is not stable.
1 Like
Ajin_A
October 18, 2025, 4:41am
17
Hi @Bean.Wang-Q ,
254.039021] Morse Micro Dot11ah driver registration. Version 0-rel_1_12_4_2024_Jun_11
Haha. Great.