Hi,
We’re using LC86L for our battery based application. Saving power is our highest priority and not worried about accuracy.
1). In such case which mode will save me power? GLP mode or Periodic mode? Device stays inside vehicle trunk.
2). Will enabling SBAS(GAGAN) help me getting fix quickly? and thus help me saving power?
3). If MCU is controlling VDD to put LC86 into BACKUP mode, after powering back will the module use Hot startup? or warm startup? or cold startup? I’ll enable EASY mode and the sleep time is 10 minutes!
4). Should MCU explicitly send command to use Hot startup after waking up from backup mode?
Considering power consumption, I suggest you to use Periodic mode.
In GLP mode, the module has good positioning performance while operating in walking and running scenarios. In a challenged environment, the module automatically switches to the operation in continuous mode to maintain good accuracy. But in static scenarios, the average current consumption in GLP mode drops to about 15 mA, which is about 50% lower than the power consumption in continuous mode.
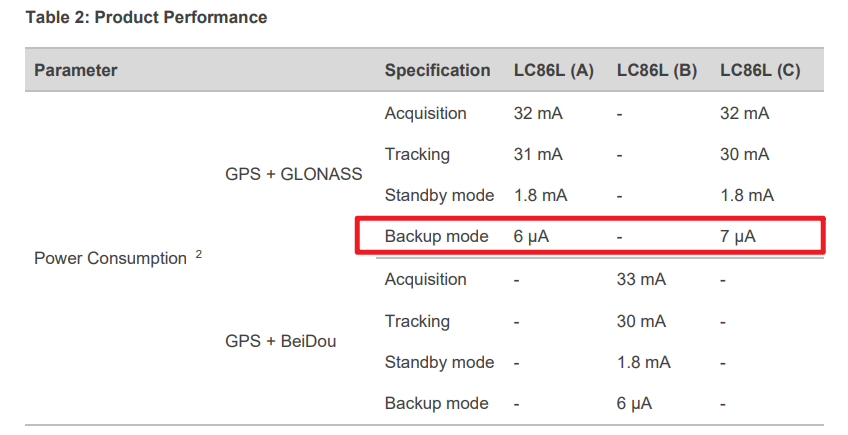
In Periodic mode, module periodically enter Backup mode and the backup consumption is more lower than GLP lowest consumption. Besides, you clearly know how long the module would sleep. So Periodic mode is a better choice.
Adding SBAS will require a bit higher consumption. But SBAS help module getting fixed.
Hot start situation: VCC power off less than 2 hours, keep V_BCKP, and module didn’t move more than 10 kilometers from the last fix. The commands of cold/warm/hot start aim to simulate the situations for tester. So there is no need to send startup command in actual use.
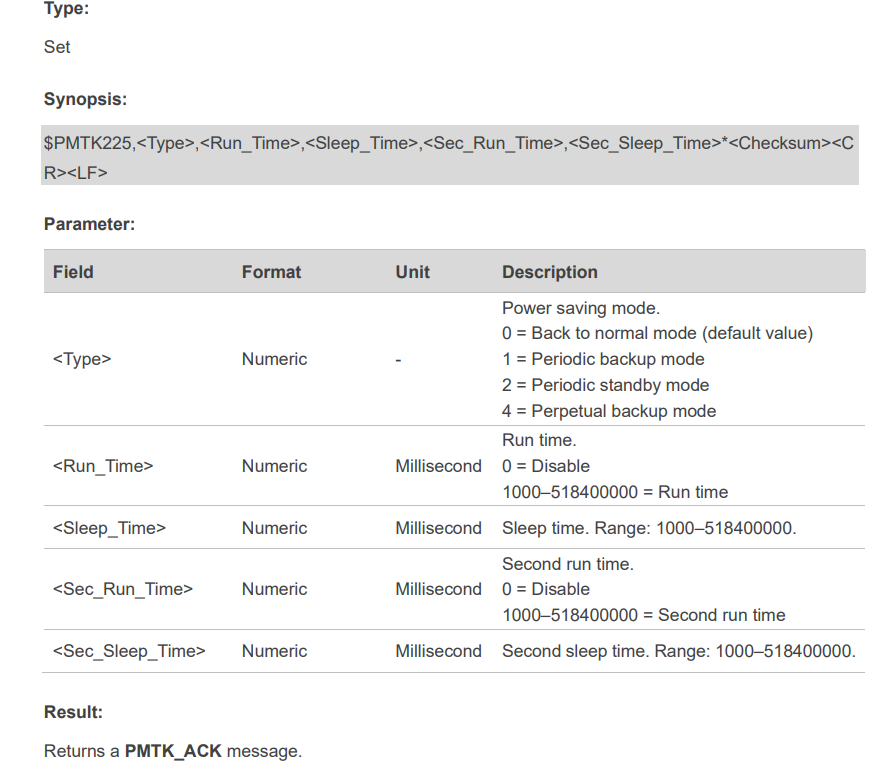
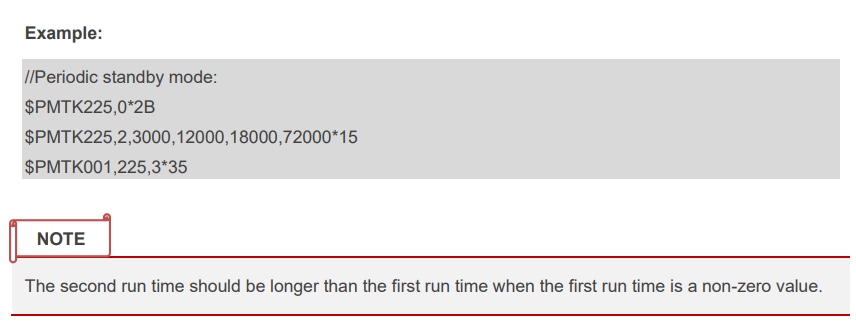
My suggestion for you: Set 30~120 seconds( 3,000~12,000 milliseconds, longer run time for bad signal environment to get fixed ) run time, and 30 minutes( 1,800,000 milliseconds ) sleep time. The final configration is up to your actual test on not only consumption but also fixed time.