Hi Oli , …congratulations to Yuri Rage for tuning…
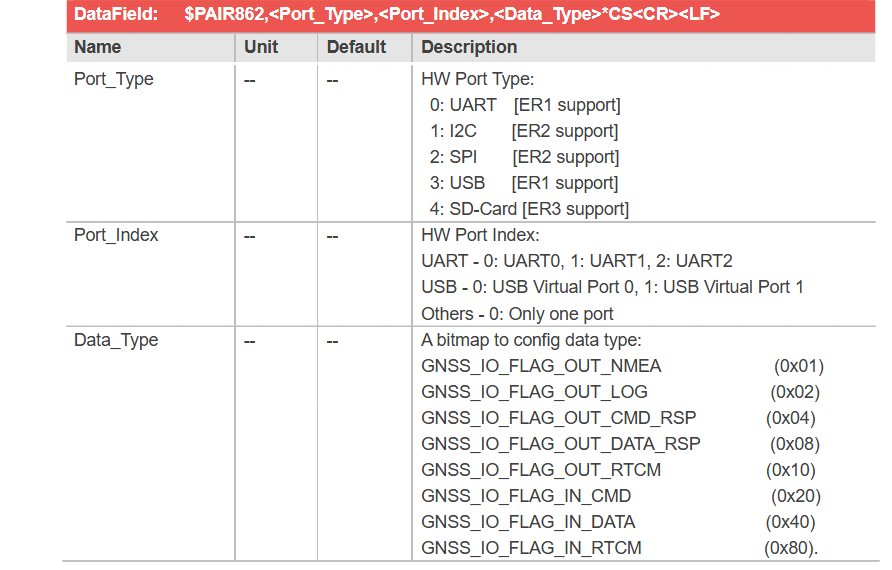

I note that on line 8 you have to remove the command gnssstop because the cold start needs to be launched with the working engine, even the reboot on line 10 is not necessary after the command cold_start , in rover_mode all nmea are default enabled,VTG enabled at stage18 however it emits only at 1hz compared to RMC and GGA following the fixrate chosen, I think this is a critical point to investigate;pair862 in row 22 refers to the manual Airoha AG3335A from which the module derives,in line 27 is fine the value 0 because in the manual airoha is not just mentioned the function 5_drone.Being useful only RMC and GGA I would be inclined to get the values of the speed from a separate module maybe connected in I2C.
Pair commands manual
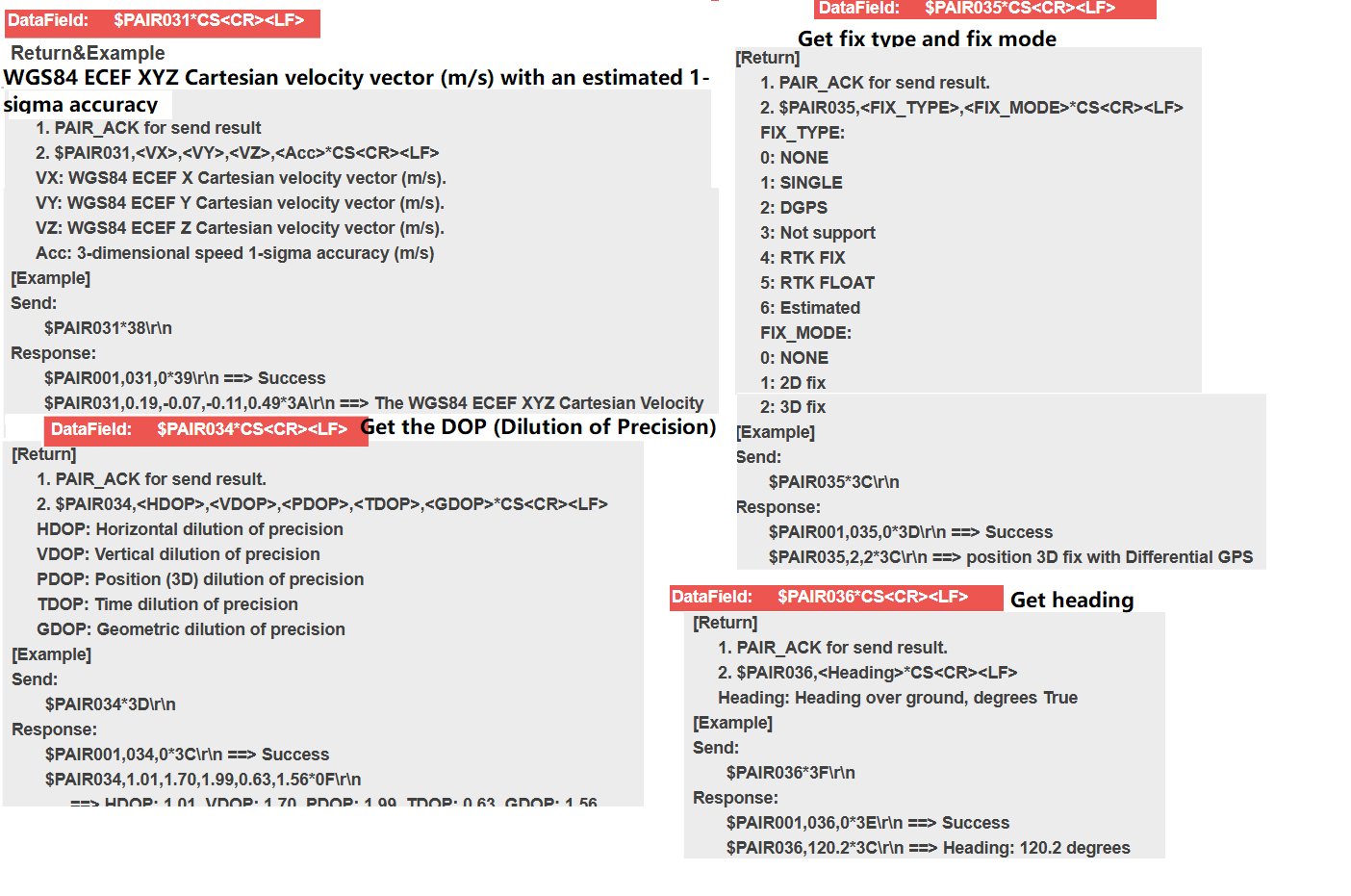
Here commands to get position, velocity,dop and fix
$PAIR030*39 pos
$PAIR031*38 vel
$PAIR034*3D dop
$PAIR035*3C fix
$PAIR864,0,0,460800*16 Set baud rate to 460800
$PAIR003*39 Power off the GNSS system, including DSP, RF, PE and clock
$PAIR512*3C Clear all data
$PQTMRESTOREPAR*13 Clear all data to default
$PAIR514*3A Clear the current configuration and restore the pair settings.
$PAIR511*3F Save current navigation data from RTC RAM to flash
$PAIR513*3D Save the current configurations from RTC RAM to NVM.
$PAIR023*3B Reboot
$PAIR007*3D Perform a cold start and clear system/user configurations.
$PQTMGNSSSTOP*09
$PQTMCFGRCVRMODE,W,1*2A Set Rover mode
$PAIR062,1,0*3F Disable GLL sentence.
$PAIR062,2,0*3C Disable GSA sentence.
$PAIR062,3,0*3D Disable GSV sentence
$PAIR062,5,0*3B ; Disable VTG sentence.
$PAIR050,200*21 ; Set position fix interval to 5Hz (200ms).
$PQTMCFGNMEADP,W,3,8,3,3,3,3*39 ; Max decimal places
$PAIR100,1,0*3A 1: ASCII NMEA v4.1 output only
$PAIR862,0,0,37*1E ; Set GNSS port data type configuration to nmea+command in & out only
$PAIR058,35*1D ; Sets the minimum SNR to 35
$PAIR070,16*16 Sets the static navigation speed threshold to 16 dm/s 1 dm/s = 0.1m/s
$PAIR072,15*17 ; Set satellite elevation mask to 15 deg.
$PAIR074,1*24 ; Enable active interference cancellation (AIC) function
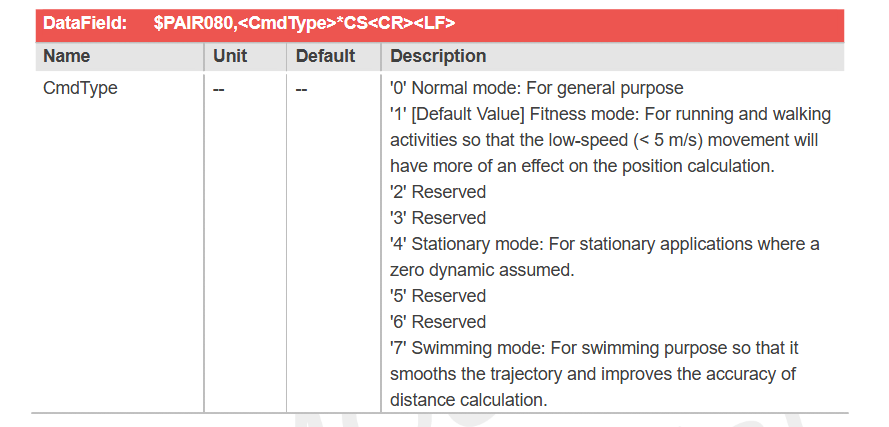
$PAIR080,0*2E ; Set navigation mode = normal (mode 0).
$PAIR391,1*2C ; Enable jamming detection.
$PAIR534,0*24 disable eph notif. for newly updated EPH.
$PAIR400,1*23 ; Set RTCM correction source.
$PAIR410,0*23 Disable SBAS feature
$PAIR473,1*27 ; Enable EPO data aiding & limits saving the flash range to 80K
$PAIR092,0*2D ; Set non-static mode
$PAIR753,1*26 ; Enhance PPS timing accuracy
$PAIR513*3D ; Save current configurations from RTC RAM to NVM.
$PQTMSAVEPAR*5A ; Save configurations into NVM.
$PAIR511*3F Save current navigation data from RTC RAM to flash
$PQTMGNSSSTART*51 → power on GNSS system